中国科大实现磁软体机器人原位动态编程
2025-03-13 18:25:41 · chineseheadlinenews.com · 来源: 中国科大新闻网
近日,中国科学技术大学工程科学学院、人形机器人研究院的李木军副教授,张世武教授,联合计算机科学与技术学院李向阳教授,提出了一种新型动态重编程磁控软体机器。通过可感知磁谐振结合相变软材料设计,实现了单个或多个磁软体机器人的原位重编程,并演示了其在复杂任务、多机协作和原位组装等多方面的应用。成果以“Addressable and perceptible dynamic reprogram of ferromagnetic soft machines”为题发表在国际知名期刊《自然通讯》(Nature Communications)上。
磁控软体机器人因其无线可控性、多功能性和生物安全性,在生物医学中得到广泛应用。但传统磁性软体机器人依赖固定磁化模式,其功能与适应性受限于单一预设形态,同时由于全局磁场的存在,如何实现多机系统间选择性驱动和共同协作也一直是磁控软体机器人应用的关键问题。针对上述问题,研究团队提出了一种多磁场协同作用的控制策略。通过柔性谐振电路设计,利用高频磁场(50-400 kHz)选择性加热机器人特定区域,可实时感知能量传输状态。同时,采用低温相变磁性复合材料,并利用脉冲磁场打破磁颗粒间作用力,在40 mT低编程磁场下即可通过固-液相变实现磁化方向快速重构,磁化强度较传统方法提升104%。该控制策略在生物安全温度范围(30-70℃)内即可完成磁化重构,避免生物体高温灼伤。
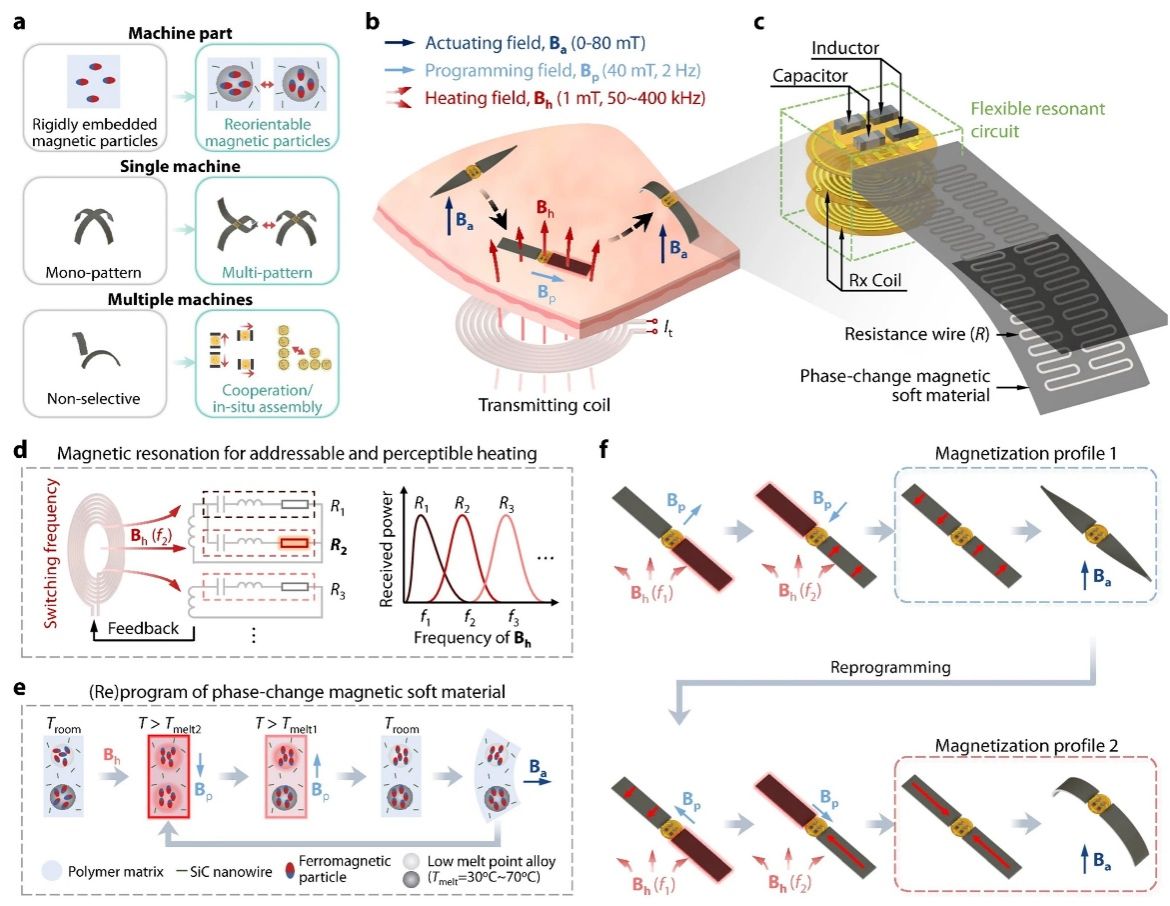
图1.动态可重编程的磁性软体机器设计
研究团队提出的动态重编程磁控软体机器在多场景应用中展现出显著优势,从单机多模态变形到多机选择性驱动与协作,从靶向送药到生物实验,实现了多场景应用的突破。为了展示其多模态变形的能力,研究团队开发了一种基于机械臂的磁控系统和小型化设计的轮式磁控机器人,在胃部环境中,轮式机器人可通过动态磁化控制实现多目标药物释放,精准定位病灶区域,实现了其在精准医疗与靶向送药中的应用。此外,通过动态重编程策略,研究团队实现了多机系统的选择性驱动与协作。在生物实验遥操作中,微型化设计机器人可分别携带不同试剂,在细胞培养场景中实现选择性染色,分别标记细胞骨架与细胞器。还通过机械连锁机制,使多个机器人间能够动态组装/解离,形成适应任务需求的复合结构(如跨越沟槽的加长体),突破单体尺寸限制,提升系统可扩展性。
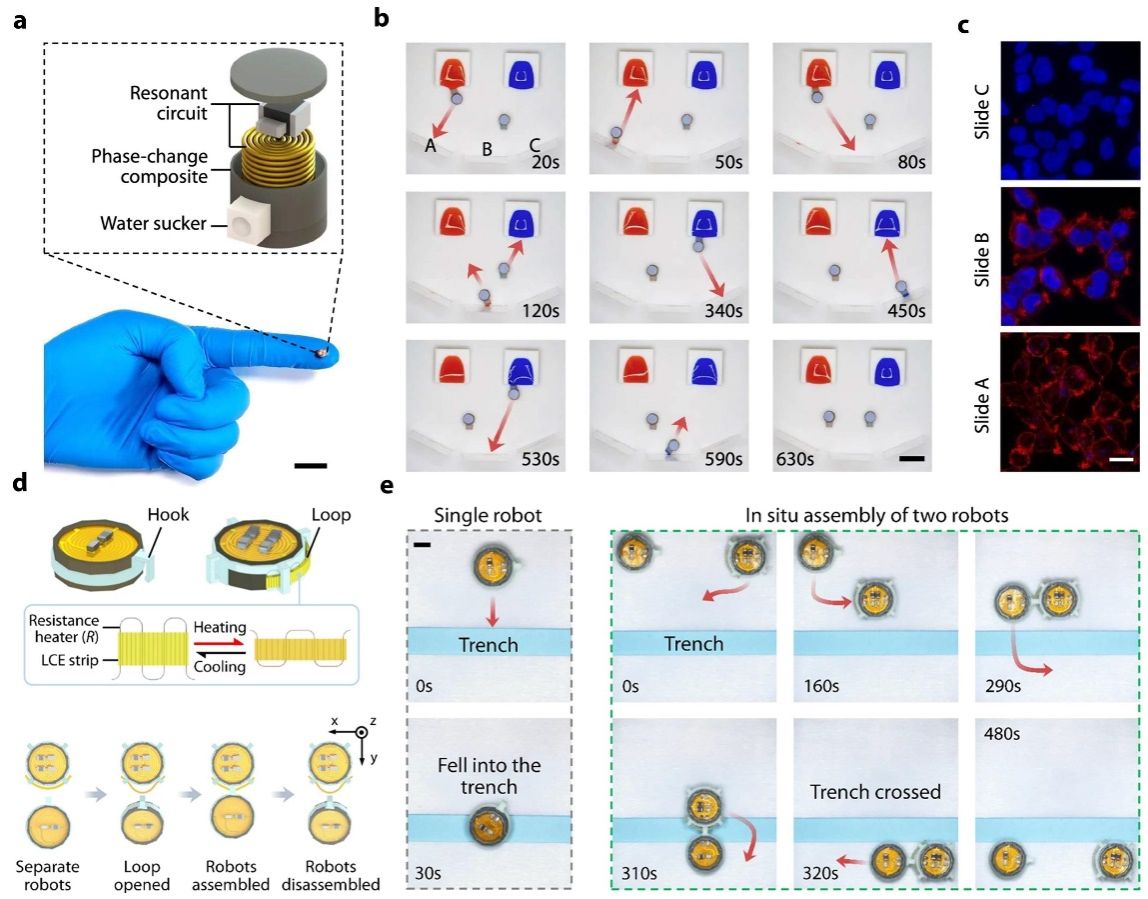
图2.动态可重编程磁性软体机器的多领域应用
中国科学技术大学精密机械与精密仪器系博士后孙宇轩、博士生孙博熙和计算机科学与技术学院博士生崔翔为论文共同第一作者。李木军副教授、张世武教授、李向阳教授为共同通讯作者。澳大利亚伍伦贡大学李卫华教授,中国科学技术大学生命科学与医学部、第一附属医院何立教授为论文共同作者。该研究得到了科技部国家重点研发计划、安徽省自然科学基金、中国科学技术大学双一流计划研究基金支持。部分实验获得了中国科学技术大学微纳研究与制造中心、中国科学技术大学理化科学实验中心等平台支持。